
出品 丨 搜狐汽车
作者 丨 李德辉
“只有车辆量产,你才能发现更多的问题。”2022年5月24日,在接受媒体采访时,易航智能CEO陈禹行认为,FSD可能是自动驾驶行业发展的一个拐点,而NOA则是到达这个拐点之前非常重要的一个阶段。
只有自动驾驶技术大量上车,收集到更多的数据,才能发现更多的corner case,进而逐渐解决自动驾驶一直面临的安全问题。因此自动驾驶公司的商业化问题就不仅仅是获取收入那么简单,更关系到算法迭代形成的技术实力。不过,在数据与算法形成正向循环的同时,算力消耗与成本和数据量、算法性能则陷入了此消彼长的两难境地,从而在量产成本的角度影响了上车的规模。
在这样的技术背景和逻辑下,易航智能给出了16TOPS的小算力和千元量级的解决方案。
01 技术、商业相互赋能
对于自动驾驶技术路线,业界一直存在两种观点:渐进派和跃进派。渐进派是否能够顺利的从L2/L3升级到L4级及以上?这个问题曾被视为是决定渐进派自动驾驶技术公司未来命运的关键选择。
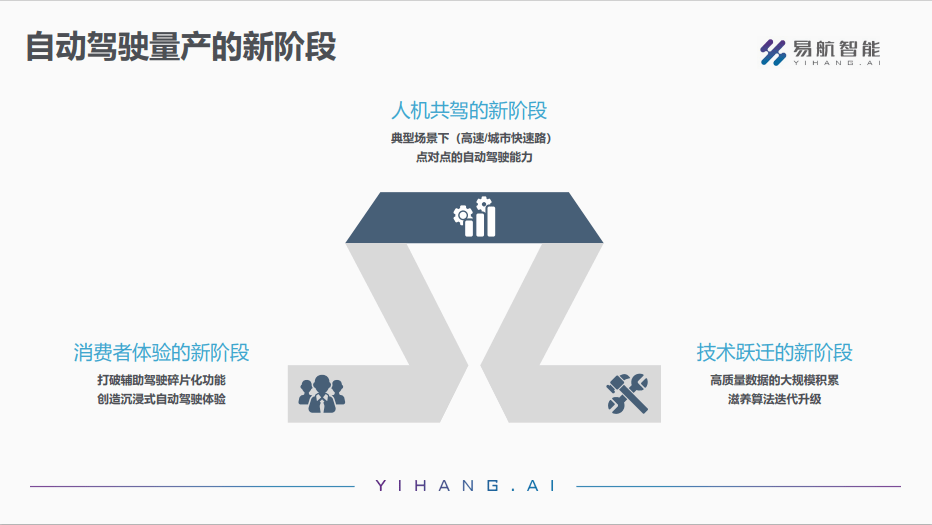
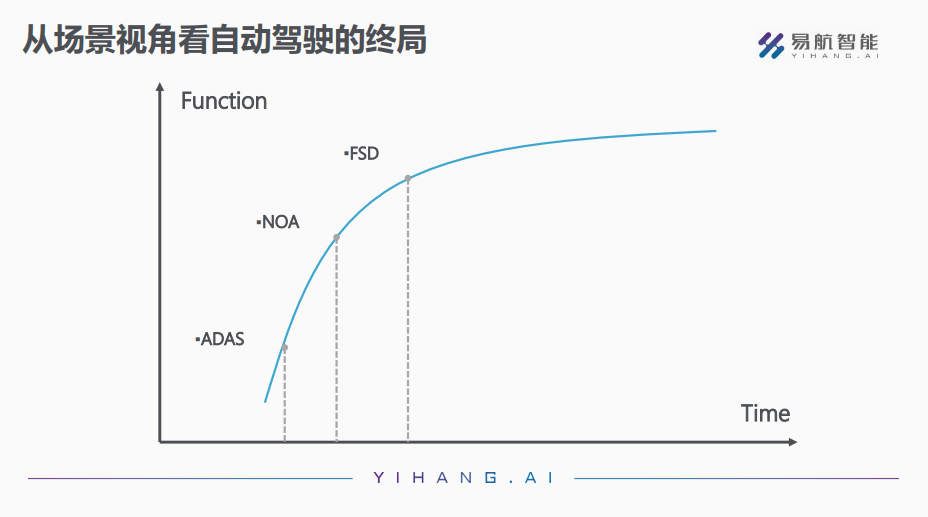
陈禹行认为:“从技术上来讲,NOA不同于传统的ADAS。对于自动驾驶来讲,或者对于人工智能来讲,数据是未来决胜的关键。因为NOA有了人机共驾的能力,所以它也要有数据收集的能力,它可以实现真正意义上的自动驾驶,所以它可以积累高价值的数据,这个也是NOA和ADAS一个质的飞跃。所以我们说这个是进入了一个自动驾驶的新阶段。”
同时,他认为,实现完全自动驾驶仍然需要较长的时间,而理想化的自动驾驶技术又需要收集大量的行驶数据完成算法和规控的优化与迭代。两者之间的矛盾需要在实践中解决,而不能仅仅停留在理论分析层面。
以上下班通勤的常见场景为例,陈禹行分析认为:“我们在上下班通勤的时候,可能整个车程要两个小时,路上我们途经一个比如说菜市场,它的环境非常复杂,地上有很多的菜叶子,路面摆放了各种各样的物品,现在技术的情况很难把这个完全解决掉。复杂的菜市场一共可能需要5分钟,所以做场景的思路就是我先把其余这个1小时55分钟的事情先解决,我们先把这些95%的时间用自动驾驶给它解决掉,剩下5%的Corner case我们可以由人来监控,后续通过行业的提升,通过逐步迭代的升级,我们把这些问题逐步解决。”
另外,他还举例说,有些corner case 是只有在量产之后才发现的具体问题。“不做量产根本想不到有这么多的问题。量产的时候我们发现,在某一个季节某一个时间点上,太阳照在双层护栏上会在地面中间形成一道线。如果太阳是强光,这个线会显得非常亮,人眼睛都很难区分它是不是车道线。类似这种Corner case会有很,如果不做量产,是完全没有办法去预料的。”
对于自动驾驶技术的提升,数据的价值毋庸置疑。然而,获取高质量的数据需要部署大量的采集车辆,以及具备高效挖掘数据的能力。商业化和数据获取合二为一,是再好不过的方式。
陈禹行介绍:“近年来有越来越多的车企开始围绕场景来做自动驾驶,通过打开场景来创造更多的价值。”他认为,从ADAS切入,不断从NOA向FSD迈进,最后经过长期的打磨,逐渐消除剩余的1%corner case。“这个是我们认为以场景为核心的自动驾驶技术的发展路径。”
02 NOA的考验
“虽然NOA很复杂,但如果你希望更多的终端用户能使用这个功能,就得把成本控制好,必须得能覆盖更多价位、更广泛的车型,这样才能实现大规模的量产。否则的话,如果只在高端车上,只是选配或者高配,永远用NOA的人是小部分的人,小部分的人就说明你的技术迭代会很慢,你的数据回传、数据积累会很慢,这都不利于自动驾驶整个行业的发展。”陈禹行表示,NOA量产上车并非简单的技术问题,而是综合了商业问题的发展问题。
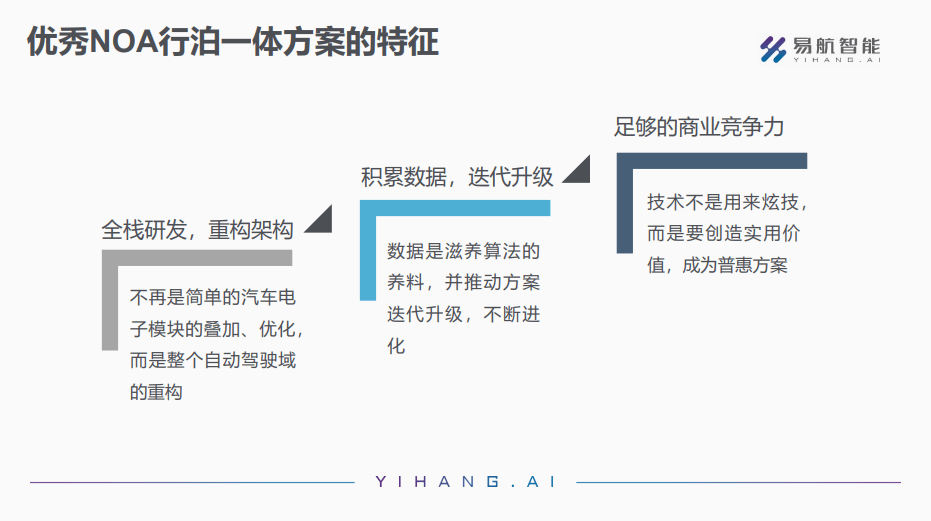
“我们现在主要关注的是在成本、功能、功耗之间找到一个最佳的平衡。”同时,一个好的NOA方案还要满足另外两个技术特点:其一,通过域控制器的形式重构整个自动驾驶域;其二,具有持续积累数据和迭代升级的能力。毫无疑问,这些都将传导给最终方案,形成成本压力,进而影响NOA方案的量产规模。
陈禹行介绍,易航智能目前能够提供具备性价比的方案。“我们采用了TI TDA4芯片,提供了单芯片和双芯片的两种方案,我们现在比市面上已经量产的这些NOA的功能和NOA的产品成本降低了50%以上,我们这套系统已经能够覆盖到15万以内的车型,这个也是目前我们中国市场量最大一部分的车型。”
据进一步了解,易航智能行泊一体的硬件配置方案一共是11V,做行车的是有7个摄像头,前面有3个,左侧前、右侧前、左侧后、右侧后一共是7个行车的,再加上4个做泊车的鱼眼镜头,一共是11个摄像头,这是我们整个的硬件配置。
具体到价格,陈禹行介绍:“大概的成本,这个可能跟各个主机厂的需求不一样,有的主机厂需要我们一起来配套雷达或者摄像头,配套整体的解决方案。现在把所有的这些跟自动驾驶相关的全算上,比如说现在的域控制器、摄像头、毫米波雷达,如果是5R11V,再加上现在有很多惯导,里面一些RTK,包括高精地图都加到一起,整个的成本应该可以做到八九千左右。因为这个里边又涉及到整个模块了,有很多模块其实并不是我们来负责的,所以对于我们这边大概是几千块的规模。”
陈禹行认为,易航智能最大的优势便是领先的自动驾驶算法和由此带来的成本优势。
03 全栈自研的重要性
自动驾驶走向量产,单凭算法优势难以满足现实需求,工程化、量产化能力关于成败最后一步。
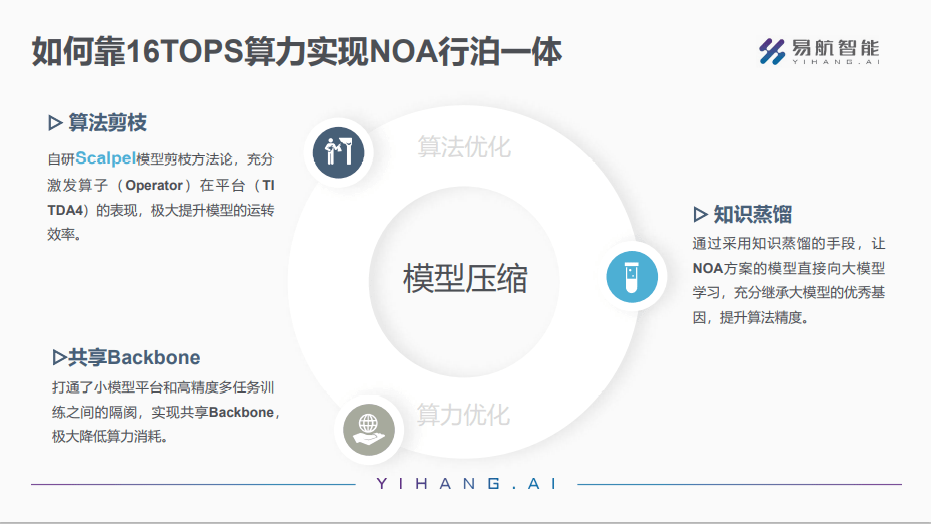
“为什么一定要强调这个方案是易航智能全栈自研的?”陈禹行反问。官方信息显示,易航智能可在16TOPS的算力平台上实现其他公司可能需要几十TOPS或者上百TOPS才能实现的NOA功能。这套方案具备16项行车功能和10项泊车功能,涵盖了NOA具备的全部功能。
陈禹行认为,全栈自研是量产的必要条件。是因为,量产需要处理的是软硬件耦合系统,是一个全新的产品,会面临各种未曾预料到的问题。正是具备全栈自研的能力,易航智能能够将软硬件统一,站在最高利益的角度进行统筹,而避免了不必要的内部协调和内耗。
他举例说:“我们在做自动驾驶控制器的DV和PV实验的时候,用了一个高于行业标准的、最大的震动强度来震整个的控制器和摄像头。在震动的时候发现在极端恶劣的震动条件下,接插件会出现闪断的情况。这个图象可能只传过来半帧图象,另外半帧还没有过来。这个时候软件和硬件的团队就会有分歧了,软件说你必须得找到一个接插件,能保证在极度恶劣的情况下不会出现闪断的情况。硬件就跟软件说,你一定要对这种传输问题、闪断的问题进行处理,因为现在根本找不到一个可以在任何震动条件下都不会闪断的接插件,这个也比较符合行业的惯例。所以,如果我们是一个软件公司,我们可能就会说需要这家做硬件的公司给我找到一个接插件,一定要满足这个条件。如果我们是一个做硬件的公司,我们就说硬件只能这样了,软件去解决吧。”
同样是技术角度,他还认为:“全栈自研是实现更好驾乘体验的一个必要条件,因为它里边感知、规划、控制这些高度耦合的。”另外,从商业化的角度,“全栈自研是服务客户的一个需要。因为主机厂对成本是有严格要求的,我们只有拥有全栈自研的能力才能根据客户的要求来提供定制化的解决方案。”比如,汽车企业对某车型的定义强调成本,那么就无法选用精度比较高的传感器,就必须做很多信号处理。再比如汽车企业希望用小算力平台却希望有更多功能,那么就需要在算法的角度进行调整。
目前,易航智能的全栈自研方案包含感知算法、决策规划控制、软硬件研发以及测试标定,其中硬件涉及域控制器和摄像头,并在苏州建有专用的自动驾驶摄像头工厂。
免责声明:以上内容(如有图片或视频亦包括在内)有转载其他网站资源,如有侵权请联系删除









